نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 27 ارديبهشت 1400
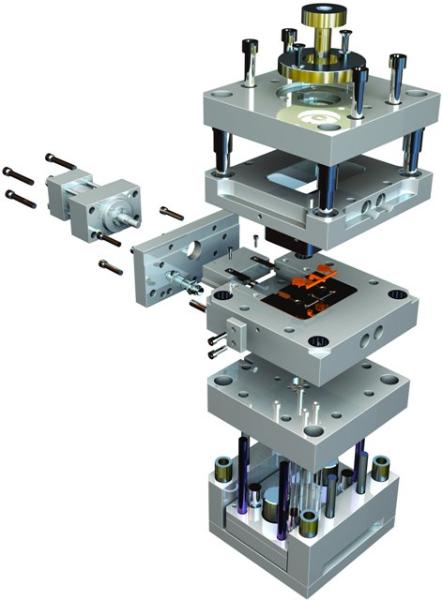
کتاب طراحی قالب تزریق پلاستیک (Injection Mold Design)،جزء یکی از کتاب های برتر در زمینه طراحی قالب های تزریق پلاستیک شناخته شده است که حاوی مطالب بسیار ارزشمند در این زمینه می باشد. از مباحث بارز این کتاب می توان به موارد زیر اشاره نمود:
ارائه مباحث طراحی قالب به شکل دسته بندی شده و منسجم
ارائه مطالب به زبانی ساده و قابل فهم با بیان جزئیات
ساده سازی در طرح های نمونه به نحوی که فرآیند ساخت و مونتاژ قالب یا امکانات رایج کارگاهی و با کمترین هزینه قابل اجرا باشد.
ارائه صدها طرح نمونه کاربردی
نمایش کامل جزئیات نقشه ها به نحوی که ابهامی در زمان استفاده برای خواننده ایجاد نشود
کاربرد قطعات استاندارد قالب در طرح های نمونه و معرفی شرکت های معتبر سازنده قطعات
تنظیم مباحث کتاب به نحوی که کتاب حالت خودآموز داشته باشد
کتاب طراحی قالب تزریق پلاستیک (Injection Mold Design)، نوشتهRonald George William Pye, Plastics and Rubber Institute و ترجمه مهندس اصغر رئوفی می باشد. این کتاب مشتمل بر 820 صفحه، در 3 قسمت، 16 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
قسمت اول: مبانی طراحی قالب
فصل اول: قالب سازی
کلیات
ماشین های افزار
ریخته گری
رسوب گیری الکتروشیمیایی
هوبتینگ سرد
ریخته گری فشاری
ماشین کاری با اسپارک
مونتاژ و عملیات دستی
فصل دوم: ساختمان عمومی قالب
واژه های فنی پایه
حفره ها و ماهیچه های قالب
نگهدارنده ها
قطعات فرعی قالب
بستن قالب روی صفحات ماشین تزریق
فصل سوم: سیستم های پران
کلیات
شبکه پران
مجموعه صفحات پران
انواع روش های پران
عمل پران از نیمه ثابت قالب
راهگاه کش
فصل چهارم: سیستم تغذیه
کلیات
راهگاه
ورودی ها
فصل پنجم: سطح جدایش
کلیات
سطح جدایش تخت
سطح جدایش غیر تخت
آزادسازی سطوح جدایش
تخلیه هوا
فصل ششم: خنک کاری قالب
کلیات
خنک کاری صفحات قالب نوع اینتگری
خنک کاری مجموعه های اینسرت نگهدارنده
خنک کاری دیگر قطعات قالب
آب بندها و اتصالات آب
فصل هفتم: سیستم های استاندارد قالب
کلیات
سیستم های استاندارد قالب های دو قسمتی
متغیر های سیستم قالب دو قسمتی
خلاصه
اختلافات با سیستم قالب استاندارد
قسمت دوم: انواع طراح های قالب
فصل هشتم: اسپلیت ها
کلیات
اسپلیت های کشویی
اسپلیت با حرکت زاویه دار
خلاصه
قطعات استاندارد برای قالب های نوع اسپلیتی
فصل نهم: ماهیچه های جانبی و حفره های جانبی
کلیات
شکل های کلی طرح
انواع ماهیچه های جانبی و حفره های جانبی
قطعات استاندارد قالب
فصل دهم: قالب گیری قطعات با تورفتگی داخلی
کلیات
پین فرم دار
ماهیچه های اسپلیتی
ماهیچه های جانبی
پراندن تورفتگی داخلی
قطعات استاندارد قالب
فصل یازدهم: طراحی قالب برای قطعات رزوه دار
کلیات
قالب برای قطعات با رزوه داخلی
قالب ها برای قطعات با رزوه خارجی
ساختمان قالب
قطعات استاندارد برای قالب های تولید قطعات رزوه دار
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
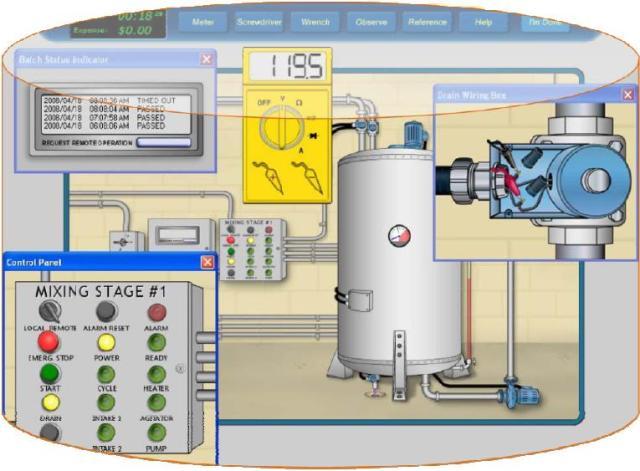
پیشرفت دانش و تکنولوژی سبب شده است که فرآیندهای تولید، پیچیده و دقیق تر شوند و در نتیجه کنترل آنها سخت تر و پیچیده تر شده است. به طوری که سیستم های کنترل سنتی مانند سیستم های رله ای و سیستم های مبتنی بر مدارهای منطقی قادر نیستند نیازهای صنایع امروزی را برآورده سازند. همچنین در سیستم های کنترل سنتی تغییر دستور العمل های کنترل و یا گسترش آن که لازمه یک صنعت پویاست مستلزم انجام تغییرات زیاد در سخت افزار و صرف هزینه بالاست. در سیستم های کنترل صنعتی، سنسورها با توجه به نیاز صنایع پیشرفته ابداع گردیده و تولید شده اند. سنسورها در سیستم های صنعتی بیشتر عملکرد آن به صورت نرم افزاری تعیین می شود و به این علت یک سنسور یا مجموعه ای از سنسورها را می توان با کاربردهای مختلف منطبق نمود و استفاده کرد...
جزوه آموزشی کنترل صنعتی (Industrial Control)،جزوه ای مفید و کاربردی از درس کنترل صنعتی دانشکده فنی تبریز است. این جزوه مشتمل بر 105 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات و فرمول های مهم و کاربردی به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
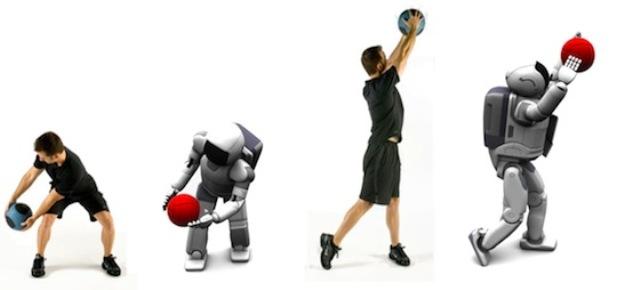
در حال حاضر، بررسی ابعاد مختلف تحقیقات روباتیک توسط متخصصان زمینه های گوناگون انجام می پذیرد. معمولا نمی توان فردی را پیدا کرد که بر کل زمینه رباتیک مسلط باشد. از این رو این رشته به رشتههای فرعی تقسیم شده است. به طور مجرد میتوان رباتیک را به چهار رشته فرعی اعمال مکانیکی، انتقال و حرکت، بینایی کامپیوتر و هوش مصنوعی تقسیم کرد. در این کتاب رشته فرعی علم و مهندسی اعمال مکانیکی معرفی میشود. مبانی این رشته فرعی روباتیکی در چندین زمینه کلاسیک مختلف یافت میشود که اصلی ترین آنها مکانیک، نظریه کنترل و علوم کامپیوتر است.
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)، در این کتاب فصلهای ۱ تا ۸ عنوانهایی از مهندسی مکانیک و ریاضیات، فصلهای ۹ تا ۱۱ موضوعاتی در نظریه کنترل و فصلهای ۱۲ تا ۱۳ مطالبی در علوم کامپیوتری را در بر میگیرند. به علاوه، در این کتاب بر جنبههای محاسباتی مسائل تاکید شده است و در پایان فصلهایی که بیشتر درباره مکانیک بحث کرده اند، بخشی کوتاه ویژه مسائل محاسباتی در نظر گرفته شده است. این کتاب مشتمل بر 570 صفحه، در 13 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
فصل اول: مقدمه
زمینه
مکانیک و کنترل بازوهای مکانیکی ماهر
نمادگذاری
فصل دوم :توصیف ها و تبدیل های فضایی کلی
مقدمه
توصیف ها: مکان ها، جهت گیری ها و چهار چوب ها
نگاشت ها: تغییر دادن توصیف ها از چهارچوبی به چهارچوب دیگر
عملگرها: انتقال ها، دوران ها و تبدیل های کلی
خلاصه تعبیرها
عملیات ریاضی در تبدیل کلی
معادله های تبدیل
مطالبی دیگر درباره نمایش جهت گیری
تبدیل بردارهای آزاد
ملاحظات محاسباتی
فصل سوم: سینماتیک بازوهای مکانیکی ماهر
مقدمه
توصیف رابط
توصیف اتصال رابط
قرارداد برای اتصال چهارچوب ها به رابط ها
سینماتیک بازوهای مکانیکی ماهر
فضای کاراندازی، فضای مفصلی و فضای دکارتی
مثال ها: سینماتیک دو روبات صنعتی
چهارچوب های با نام های استاندارد
ابزار کجاست؟
ملاحظات محاسباتی
فصل چهارم: سینماتیک وارون بازوهای مکانیکی ماهر
مقدمه
حل پذیر بودن
نمادگذاری زیر فضای بازوی مکانیکی ماهر در حالت 6 >n
راه حل جبری در مقابل راه حل هندسی
راه حل جبری از طریق تبدیل به چند جمله ای
روش حل پایپر برای سه محور متقاطع در یک نقطه
مثال هایی از سینماتیک وارون بازوهای مکانیکی ماهر
چهارچوب های استاندارد
استفاده از زیر برنامه SOLVE برای بازو های مکانیکی ماهر
دقت و تکرارپذیری
ملاحظات محاسباتی
فصل پنجم: ژاکوبی ها، سرعت ها و نیروهای استاتیکی
مقدمه
نمادگذاری برای مکان و جهت گیری متغیر با زبان
سرعت خطی و دورانی اجسام صلب
مطالبی بیشتر درباره سرعت زاویه ای
حرکت رابط های روبات
چگونگی اشاعه سرعت از رابطی به رابط دیگر
ژاکوبی ها
حالت های تکین
نیروهای استاتیکی در بازوهای مکانیکی ماهر
ژاکوبی ها در حوزه نیرو
تبدیل دکارتی سرعت ها و نیروهای استاتیکی
فصل ششم: دینامیک بازوهای مکانیکی ماهر
مقدمه
شتاب جسم صلب
توزیع جرم
معادله نیوتن معادله اویلر
محاسبات دینامیکی تکراری نیوتن اویلر
معادله های تکراری و معادله های به شکل بسته
مثالی از معادله های دینامیکی بسته
ساختار معادله های دینامیکی بازوهای مکانیکی ماهر
روش لاگرانژ در به دست آوردن معادله های دینامیکی بازوهای مکانیکی
بدست آوردن معادله های دینامیکی بازوهای مکانیکی در فضای دکارتی
شمول اثرات جسم غیر صلب
شبیه سازی دینامیکی
ملاحظات محاسباتی
فصل هفتم: تولید مسیر
مقدمه
ملاحظات کلی درباره توصیف و تولید مسیر
روش های فضای مفصلی
روش های فضای دکارتی
مشکلات هندسی مسیرهای دکارتی
تولید مسیر در هنگام اجرای برنامه کامپیوتری
توصیف مسیر با زبان برنامه ریزی روبات
طرح ریزی مسیر با استفاده از مدل دینامیکی
طرح ریزی مسیرهای عاری از برخورد
فصل هشتم: مکانیزم بازوهای مکانیکی ماهر
مقدمه
طراحی بر پایه عملیات خواسته شده از روبات
پیکربندی سینماتیکی
معیارهای کمی مشخصات فضای کاری
سازه های زنجیری زاید و بسته
روش های کارانداز
سختی و تغییر شکل خمشی
حس مکان
حس نیرو
فصل نهم: کنترل خطی بازوهای مکانیکی ماهر
مقدمه
کنترل مدار بسته و پس خوراند (فید بک)
سیستم های خطی درجه دوم
کنترل سیستم های درجه دوم
تقسیم قانون کنترل
کنترل تعقیب مسیر
دفع اغتشاش
کنترل زمانی پیوسته و ناپیوسته (منقطع)
مدل سازی و کنترل یک مفصل تنها
ساختمان کنترل کننده یک روبات صنعتی
فصل دهم: کنترل غیر خطی بازوهای مکانیکی ماهر
مقدمه
سیستم های غیر خطی و متغیر با زمان
سیستم های کنترل چند ورودی چند خروجی
کنترل بازوهای مکانیکی ماهر
ملاحظات عملی
سیستم های کنترل روبات های صنعتی امروزی
تحلیل پایداری لیاپونوف
سیستم های کنترل مبتنی بر مختصات دکارتی
کنترل تطبیقی
فصل یازدهم: کنترل نیرو در بازوهای مکانیکی ماهر
مقدمه
کاربرد روبات های صنعتی در عملیات مونتاژ
چهارچوب اعمال کنترل در عملیات مقید شده جزئی
مسئله کنترل ترکیبی مکان نیرو
کنترل نیروی سیستم جرم فنر
روش های کنترل ترکیبی مکان نیرو
روش های کنترل روبات های صنعتی کنونی
فصل دوازدهم: سیستم ها و زبان های برنامه ریزی روبات
نویسنده : www.BartarFile.ir
تاریخ : شنبه 18 ارديبهشت 1400
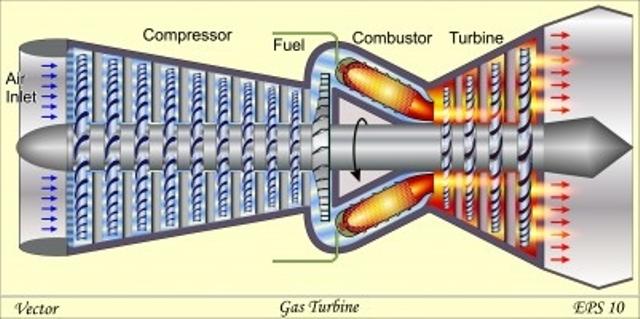
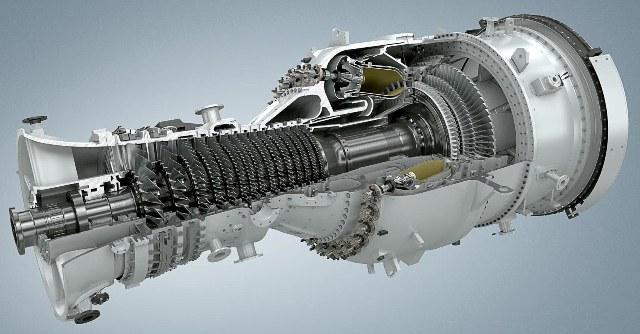
توربین گازی Gas Turbine یک ماشین دوار است که بر اساس انرژی گازهای ناشی از احتراق کار میکند. هر توربین گاز شامل یک کمپرسور برای فشرده کردن هوا، یک محفظه احتراق برای مخلوط کردن هوا با سوخت و محترق کردن آن و یک توربین برای تبدیل کردن انرژی گازهای داغ و فشرده به انرژی مکانیکی است. بخشی از انرژی مکانیکی تولید شده در توربین، صرف چرخاندن کمپرسور خود توربین شده و باقی انرژی، بسته به کاربرد توربین گاز، ممکن است ژنراتور برق را بچرخاند (توربو ژنراتور)، به هوا سرعت دهد (توربوجت و توربوفن) و یا مستقیماً (یا بعد از تغییر سرعت چرخش توسط جعبه دنده) به همان صورت مصرف شود (توربوشفت، توربوپراپ و توربوفن). مبنای کار توربینهای گاز از نظر ترمودینامیکی، بر اساس چرخهٔ برایتون است که در آن، هوا به صورت بیدررو فشرده شده، احتراق در فشار ثابت رخ داده و انبساط هوای فشرده و داغ در توربین، به صورت بیدررو رخ میدهد و هوا به فشار اولیه میرسد. در عمل، اصطکاک و توربولانس باعث میشوند که:
فشردهسازی هوا در کمپرسور به صورت بیدررو نباشد. این موجب میشود که برای دستیافتن به یک نسبت فشار معین، دمای خروجی کمپرسور بیشتر از حالت ایدهال باشد.
انبساط هوا در توربین به صورت بیدررو نباشد. این موجب میشود که با ثابت بودن مقدار کاهش دما در توربین، کاهش فشار ناشی از آن افزایش یافته و انبساط کمتری برای تولید کار در توربین فراهم باشد. افت فشار در ورودی هوا، محفظهٔ احتراق و اگزوز وجود داشته باشد.
این موضوع باعث میشود که نسبت فشار موجود برای تولید کار کاهش یابد. افت فشار در ورودی هوا باعث کاهش فشار در ورودی کمپرسور و در نتیجه کاهش فشار ورودی محفظهٔ احتراق و توربین میشود. افت فشار در محفظه و اگزوز، به ترتیب به کاهش فشار ورودی به توربین و افزایش فشار خروجی توربین میانجامند که همهٔ این عوامل، باعث کاهش نسبت فشار موجود در توربین برای تولید کار میشوند. با افزایش دمای هوای ورودی به توربین، راندمان توربینهای گاز افزایش مییابد. بنابراین، بهتر است که این دما هر چه بیشتر انتخاب شود. اما در این مورد از نظر تحمل مواد تشکیلدهندهٔ محفظهٔ احتراق و پرههای توربین، محدودیت وجود دارد. بنابراین، در این قسمتها که به آنها بخشهای داغ Hot Sections گفته میشود، از مواد مقاوم به دماهای زیاد مانند سوپر آلیاژها استفاده میشود. همچنین این قسمتها با استفاده از تکنولوژیهای پیچیدهای، خنککاری میشوند.
کتاب مرجع توربین های گازی (Gas Turbine Handbook)،نه تنها به عنوان یک مرجع جامع شناخته شده است بلکه پرفروش ترین کتاب در این زمینه نیز می باشد، که در آن اطلاعات اساسی در مورد طرز کار و استفاده مناسب از انواع توربین های گازی به شما داده می شود. در این کتاب در مورد سخت افزار، پارامترهای عملیاتی، کنترل، ورودی و خروجی ها، بازرسی، عیب یابی، کنترل سر و صدا، سیستم های خنک کننده و… بحث می شود. آخرین نسخه این کتاب که در دست شماست شامل فصل های جدید در Microturbines و مطالعات موردی در این خصوص است. این کتاب مشتمل بر 453 صفحه، در 18 فصل، به زبان انگلیسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : چهار شنبه 8 ارديبهشت 1400
تاکنون پروژه های زیادی با موضوع فاصله سنج اولتراسونیک با میکروکنترلر AVR اجرا شده اند که برنامه نویسی اغلب آنها به زبان اسمبلی و بیسیک بوده که در نرم افزار Bascom نوشته شده اند. اما در این پروژه قصد داریم تا برنامه نویسی را به زبان C و در نرم افزار Codevision انجام دهیم. مدار مورد استفاده در این پروژه همان مدار استفاده شده در پروژه فاصله سنج کتاب پروژه های علمی با میکروکنترلرهای AVR می باشد.همان طور که می دانیم هر شخص طراح می بایست دارای سه خصوصیت باشد:
دایره اطلاعاتی بالایی داشته باشد، یعنی علم به روز و ابزارات جدید را خوب بشناسد.
شناخت خوبی از سخت افزار داشته باشد (طراحی PCB، شناخت سنسور، میکروکنترلر و ...)
از یک زبان برنامه نویسی آگاهی کامل داشته باشد (زبان C، پاسکال، اسمبلی و ...)
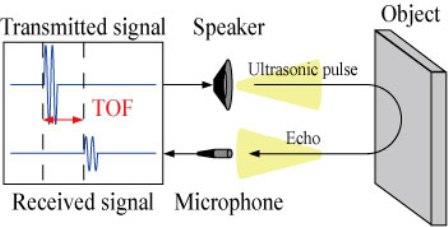
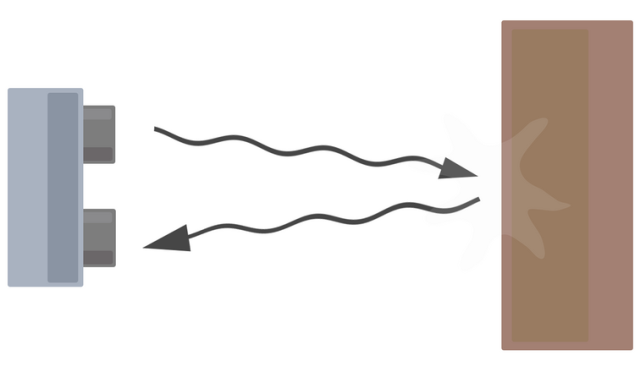
دو مورد اول به مراتب از مورد سوم پیچیده تر می باشند و هرکسی توانایی طراحی سخت افزار و مدار آنالوگ را ندارد. با این حال برنامه نویسی اصولی و صحیح (برنامه نویسی ماژولا) نیز قواعد خاص خود را دارد. در این پروژه سعی شده است تا به اختصار به هر بخش پرداخته شود. در پروژه قصد داریم دستگاهی را طراحی و پیاده سازی نماییم که بتواند فاصله اجسام مقابل، تا خود را بدون تماس دستگاه با آن اجسام اندازه بگیرد. برای این کار به یک جفت سنسور فرستنده و گیرنده مافوق صوت نیاز داریم. سنسور فرستنده اولتراسنیک امواج مافوق صوت را تولید می کند و سنسور گیرنده اولتراسنیک امواج باز تابیده شده از اجسام را دریافت می نماید. با اندازه گیری زمان رفت و برگشت امواج صوتی و با دانستن سرعت صوت، مسافت طی شده توسط صوت و هم چنین فاصله دستگاه تا جسم مورد نظر به راحتی محاسبه خواهد شد. از میکروکنترلر ATmega8 در این پروژه استفاده شده است که چند وظیفه اساسی دارد:
تولید سیگنال پالس با فرکانس 40khz که در مدار فرستنده مورد استفاده قرار می گیرد.
اندازه گیری زمان رفت و برگشت امواج صوتی بازتابیده شده از اجسام
اندازه گیری دما
محاسبه فاصله و نمایش آن بر روی نمایشگر
در طی مراحل طراحی با مشکلاتی روبرو هستیم که مهمترین آنها متغیر بودن سرعت صوت در دماهای مختلف و تضعیف سیگنال دریافتی توسط سنسور گیرنده است که در ادامه به رفع آنها پرداخته شده است...
نویسنده : www.BartarFile.ir
تاریخ : شنبه 29 فروردين 1400
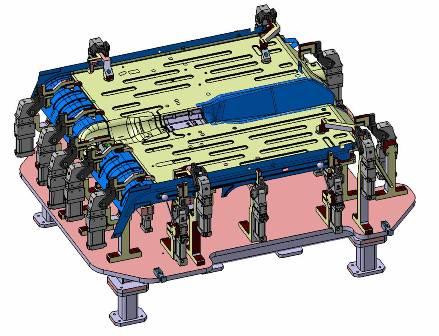
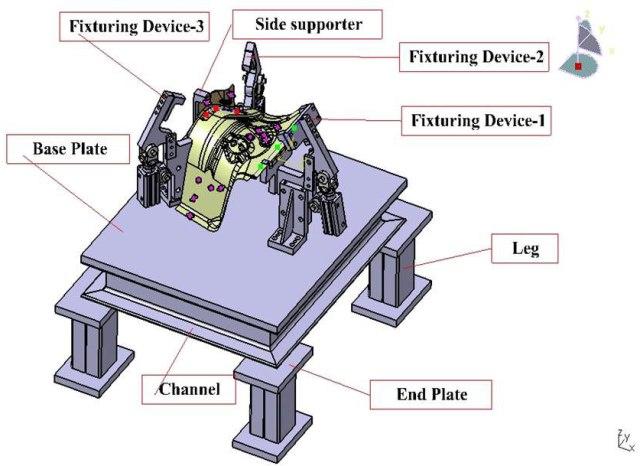
جیگ و فیکسچرها ابزارهای قطعه گیر در تولید هستند که برای ساخت دقیق قطعات همسان به کار می روند. ارتباط صحیح و چینش بین ابزار برش یا ابزارهای دیگر و قطعه کار باید حفظ شود. جیگ و فیکسچر برای نگاه داشتن، پشتیبانی و تعیین محل هر قطعه برای سوراخکاری یا ماشین کاری با محدودیت های تعیین شده است. ارتباط نزدیک جیگ و فیکسچر آنقدر نزدیک است که گاها جابجا استفاده می شود. تفاوت این دو در نحوه هدایت ابزار به قطعه کار است...
کتاب طراحی جیک و فیکسچر (Jig and Fixture Design)، کتابی مفید و کاربردی از آموزش مباحث طراحی قید و بند است، که مشتمل بر 384 صفحه، در 4 بخش و 21 فصل، به زبان انگلیسی، همراه با فرمول های اساسی، تصاویر و روابط مهم به ترتیب زیر گردآوری شده است:
SECTION I: BASIC TYPES AND FUNCTIONS OF JIGS AND FIXTURES
UNIT 1: PURPOSE OF TOOL DESIGN
UNIT 2: TYPES AND FUNCTIONS OF JIGS AND FIXTURES
UNIT 3: SUPPORTING AND LOCATING PRINCIPLES
UNIT 4: CLAMPING AND WORK HOLDING PRINCIPLES
UNIT 5: BASIC CONSTRUCTION PRINCIPLES
SECTION II: CONSIDERATIONS OF DESIGN ECONOMICS
UNIT 6: DESIGN ECONOMICS
UNIT 7: DEVELOPING THE INITIAL DESIGN
UNIT 8: TOOL DRAWINGS
SECTION III: DESIGNING AND CONSTRUCTING JIGS AND FIXTURES
UNIT 9: TEMPLATE JIGS
UNIT 10: VISE-HELD AND PLATE FIXTURES
UNIT 11: PLATE JIGS
UNIT 12: ANGLE-PLATE JIGS AND FIXTURES
UNIT 13: CHANNEL AND BOX JIGS
UNIT 14: VISE-JAW JIGS AND FIXTURES
SECTION IV: SPECIALIZED WORK HOLDING TOPICS
UNIT 15: POWER WORK HOLDING
UNIT 16: MODULAR WORK HOLDING
UNIT 17: WELDING AND INSPECTION TOOLING
UNIT 18: LOW-COST JIGS AND FIXTURES
UNIT 19: TOOLING FOR NUMERICALLY CONTROLLED MACHINES
نویسنده : www.BartarFile.ir
تاریخ : شنبه 27 فروردين 1400
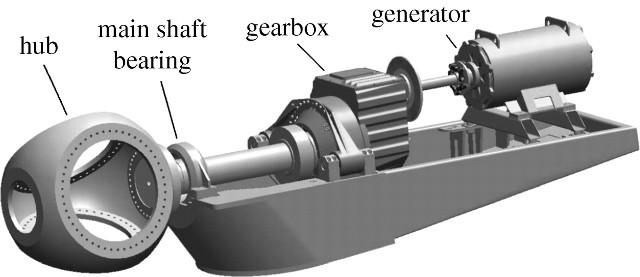
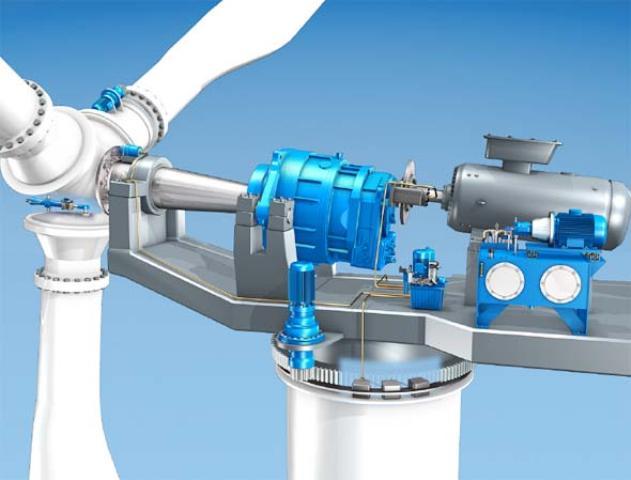
ایراد اصلی توربین هاي بادي مجهز به ژنراتور القایی از دو سو تغذیه عملکرد آن ها در طی بروز اتصال کوتاه در شبکه می باشد. در این پروژه یک روش جدید براي عملکرد بی وقفه توربین بادي مجهز به ژنراتور القایی از دو سو تغذیه در طی بروز خطا در شبکه ارایه شده است. یک محدود کننده جریان خطا به طور سري با مدار روتور قرار می گیرد، در طی بروز خطا محدود کننده جریان یک سلف بزرگ را وارد مدار روتور می کند تا از افزایش جریان در مدار روتور جلوگیري کند. هنگامی که خطا رفع شد سلف نیز از مدار روتور خارج می شود. همچنین از یک STATCOM براي تامین توان راکتیو مورد نیاز در حالت دائمی و درطی بروز خطا استفاده شده است. صحت و عملکرد روش با شبیه سازي سیستم قدرت نمونه در محیط نرم افزار PSCAD/EMTDC تایید می شود...
نویسنده : www.BartarFile.ir
تاریخ : شنبه 25 فروردين 1400
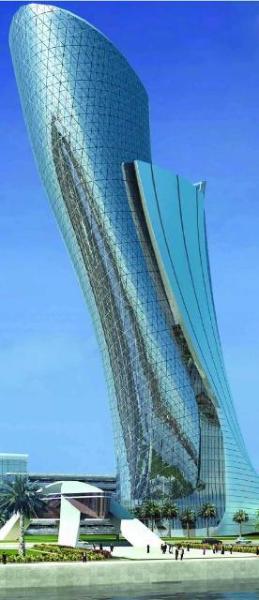
در صورتیکه ارتفاع ساختمان از یک حد معینی بیشتر شود و جزو ساختمان های بلند قرار گیرد، سیستم های سازه ای متداول جوابگوی نیازهای ما نخواهند بود زیرا در ساختمان های بلند، صلیب و پایداری ضوابط مهم تری را نسبت به مقاومت (مشخصه اصلی سازه های کوتاه) بیان می کنند. جهت پاسخ گویی به نیازهای فوق، سیستم جدیدی تحت عنوان سیستم لوله ای ابداع شده است. این سیستم دارای چنان قابلیتی است که در بیشتر حالات مقدار مصالح سازه ای مورد استفاده در این سیستم به نسبت ساختمانی که در آن از سیستم های قابی متداول استفاده شده باشد به نصف تقلیل پیدا می کند. از جمله مزایای دیگر این سیستم، انعطاف پذیری زیاد آنها در تقسیم بندی فضاهای داخلی و کاهش تغییر مکان جانبی سازه می باشد.
در این سیستم ها به علت انعطاف پذیری تیرهای پیرامونی در قاب، تغییر شکل های ناشی از برش ایجاد می شود که این پدیده، تاخیر برشی نامیده می شود و سبب می گردد که کارایی سیستم های لوله ای تا اندازه ای کاهش یابد در صورتی که تاخیر برشی به حداقل برسد می توان انتظار داشت که ساختمان بلند لوله ای همانند یک تیر طره با مقطع صندوقه ای عمل نماید. در اینپروژه سعی شده است علل و نحوه ایجاد پدیده تاخیر برشی در ساختمان های بلند لوله ای مورد بررسی و تحقیق قرار گرفته و روش هایی برای کاهش این پدیده ارائه گردد. یکی از روش ها، استفاده از مهاربندها می باشد که بحث اینپروژه بیشتر بر روی آن متمرکز گشته است. برای این منظور تاثیر تعداد و محل قرار گیری مهاربندها بر روی موضوعاتی از قبیل تاخیر برش، تغییر مکان جانبی و نیروهای دینامیکی وارد بر سازه مورد بررسی قرار گرفته و نتایج بیانگر این مطلب است که استفاده از مهاربندها بصورت زیگزاک تاثیر بیشتری در جهت کاهش تاخیر برش خواهد داشت...
نویسنده : www.BartarFile.ir
تاریخ : شنبه 24 فروردين 1400
بر خلاف سیستم انتقال قدرت اتوماتیک، در سیستم انتقال قدرت با قابلیت تغییر پیوسته، جعبه دنده ای با تعداد مشخص چرخ دنده وجود ندارد، یعنی در CVT چرخ دنده های دندانه دار درگیر با هم وجود ندارند. رایج ترین نوع CVT بر اساس سیستم پولی کار می کند که اجازه ی بینهایت تغییر بین بالاترین و پایین ترین دنده بدون گسستگی را می دهد. اگر از اینکه چرا درباره ی CVT هم از واژه دنده استفاده می شود تعجب می کنید به خاطر بیاورید که منظور از دنده نسبت سرعت موتور به سرعت محور چرخ ها می باشد.
اگرچه CVT این نسبت را بدون استفاده از چرخ دنده های سیاره ای انجام می دهد اما باز هم از واژه دنده برای CVT استفاده می شود. بیشتر CVT ها فقط سه جزء اساسی دارند:
یک تسمه محکم فلزی یا لاستیکی
یک پولی متغییر محرک (ورودی)
یک پولی خروجی
به علاوه CVT ها انواع مختلفی از ریزپردازنده ها و حسگر ها را دارا می باشند، اما سه جزءی که در بالا توضیح داده شده اند اجزای اصلی اند که به این سیستم اجازه ی کار می دهند. پولی های با شعاع متغیر قلب CVT هستند، هر پولی از دو مخروط با زاویه راس ٢٠ درجه که رو در روی یکدیگر قرار دارند تشکیل شده است، تسمه ای در شیار بین دو مخروط قرار دارد، در صورت لاستیکی بودن تسمه ها از تسمه های V شکل استفاده می شود، تسمه های V شکل از آنجا نام خود را می گیرند که سطح مقطع V شکل دارند که اصطکاک تسمه با پولی را افزایش می دهد.
پروژه سیستم انتقال قدرت پیوسته (CVT)،در 24 اسلاید، با فرمت powerpoint و 9 صفحه با فرمت word به زبان فارسی، همراه با 5 فایل ویدیویی که نحوه کار و تاثیر سیستم انتقال قدرت CVT را نمایش می دهد و تصاویر و ذکر نکات مهم سیستم cvt به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : شنبه 22 فروردين 1400
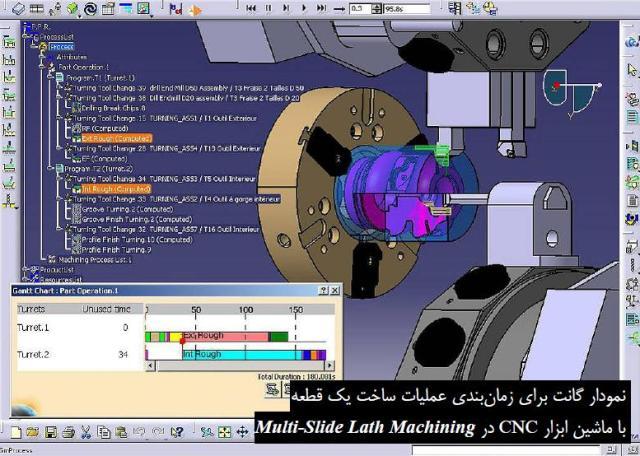
در محیط Prismatic Machining نرم افزار کتیا، برنامه ماشينكاري با ماشين ابزارهاي فرز تهيه و كدهاي آن براي استفاده در ماشين هاي فرز NC استخراج مي شود. در محیط Prismatic Machining مي توان به راحتي عمليات سوراخكاري و فرزكاري با ماشين ابزار هاي سه تا پنج محوره و همچنين ماشين هاي سه محوره با ميز چرخان ر ا برنامه ريزي نمود. اين محيط برنامه ريزي عمليات برش با سرعت هاي بالا (High Speed Cutting) را نيز پشتيباني می نماید. نكته مهم در شبيه سازي، بررسي مسير ابزار مي باشد و مقصود كنترل ابزار در حين حركت از نقطه اي به نقطه ديگر براي بررسي احتمال برخورد با قطعه مي باشد. برخوردهاي ناگهاني در سرعت هاي بالا باعث آسيب ديدن قطعه، دستگاه و ابزار مي شود...
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.













 آمار
وبلاگ:
آمار
وبلاگ: